

细粉加工设备(20-400目)
我公司自主研发的MTW欧版磨、LM立式磨等细粉加工设备,拥有多项国家专利,能够将石灰石、方解石、碳酸钙、重晶石、石膏、膨润土等物料研磨至20-400目,是您在电厂脱硫、煤粉制备、重钙加工等工业制粉领域的得力助手。






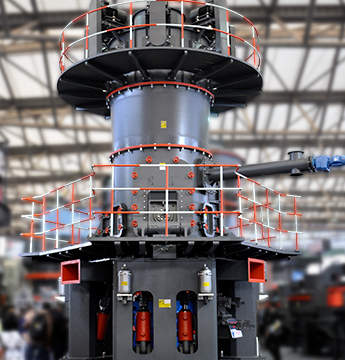
超细粉加工设备(400-3250目)
LUM超细立磨、MW环辊微粉磨吸收现代工业磨粉技术,专注于400-3250目范围内超细粉磨加工,细度可调可控,突破超细粉加工产能瓶颈,是超细粉加工领域粉磨装备的良好选择。

粗粉加工设备(0-3MM)
兼具磨粉机和破碎机性能优势,产量高、破碎比大、成品率高,在粗粉加工方面成绩斐然。

哪种机械臂结构


机械臂1机械臂构型CSDN博客
铰接型操作臂,有时候被称为关节型,轴型或者拟人操作臂。这种类型的操作臂通常由两个“肩”关节。一个肘关节。以及2个或者3个位于操作臂末端的腕关节组成。 铰接型机器人减少了操作臂在工作空间中的干涉,使操作臂能够到达指定的空间位置。它们的整体结构比笛卡尔操作臂小,可应用于工作空间较小的场合,成本较 展开机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。机械手臂(机械人技术领域中广泛应用的装置)百度百科
.jpg)
第七讲机器人的机械臂结构 百度文库
机器人机械臂的结构通常由关节、连杆和末端执行器组成。 关节是连接连杆的旋转或者移动部件,它们可以提供机械臂灵活的运动自由度。 机器人机械臂的关节一般采用电动或液 2023年7月20日 机械臂是一种能够模拟人类手臂运动的机器装置,在工业生产、医疗、军事等领域发挥着重要作用。 机械臂结构 的设计是实现其高效运行和精准操作的关键。机械臂的基本结构包括机械臂本体、关节和末端执行器。机械臂本体是由多个连接的杆 机械臂结构大族机器人
.jpg)
【Robot 学院】一文读懂六轴机器人运动原理和机
2018年8月28日 六轴关节机器人的机械结构 上图为常见的六轴关节机器人的机械结构,六个伺服电机直接通过减速器、同步带轮等驱动六个关节轴的旋转。六轴工业机器人一般有6个自由度,常见的六轴工业机器人包含 2017年11月1日 图410所示为3自由度手腕的几种结合方式。 4 常见的腕部结构 图411所示为RRR型3自由度手腕,三个传动轴的回转轴线共线,及,转动实现手 臂的臂转,和A的转动实现腕转。RRR型手腕制造简单,润滑条件好,可以实现较远距 离的传动,机械效率高 工业机器人的腕部和手部结构
.jpg)
知乎 有问题,就会有答案
2018年4月25日 典型机械臂结构(图例详解)腾讯云开发者社区腾讯云 抱歉,出错了! 欢迎前往用户之声反馈相关问题 前往用户之声 返回社区首页 1.手臂直线运动机构 常见方式:行程小时:采用油缸或汽缸直 典型机械臂结构(图例详解)腾讯云开发者社区
.jpg)
机械臂驱动结构简析腾讯云开发者社区腾讯云
2021年3月14日 1 机械臂结构及其驱动方式 工业机械臂是由一系列关节和连杆构成,大部分机械臂的连杆以串联形式连接,且每个关节位置由一个变量定义,因此,关节数目等于自由度数目。 六自由度机械臂是常见 机械手臂是机械人技术领域中得到最广泛实际应用的 自动化机械 装置,在 工业制造 、医学治疗、 娱乐服务 、军事、半导体制造以及太空探索等领域都能见到它的身影。 尽管它们的形态各有不同,但它们都有一个共同 机械手臂(机械人技术领域中广泛应用的装置)百

章机器人组成及机构 西安交通大学教师个人主页平台
2022年4月23日 质上是一个拟人手臂的空间开链式机构。一端固定在基座上,另一端可自由运动,由关节连杆结构所构成的机械臂大体可分为基座、腰部、臂部(大 臂和小臂)和手腕4 部分。1) 基座基座是机器人的基础部分,起支撑作用。2) 腰部腰部是机器人手臂的支承部 2019年5月4日 起重机的分类都有哪几种 ?在建桥工程中所用的起重机械,根据其构造和性能的不同,一般可分为轻小型起重设备、桥式类型起重机械和臂架类型起重机,缆索式起重机四大类。轻小型起重设备如:千斤顶、气动葫芦、电动葫芦 起重机的分类都有哪几种?百度知道

气动机械手回转臂结构设计 百度文库
气动机械手回转臂结构设计 图1机械手回转臂系统工作原理图 气动技术有以下优点:(1)全程平衡、运动顺滑,可使不同物料或工件达到重力平衡状态,实现物料的精确位移操作。 (2)空载、满载及处理不同工件时,系统可感知其重量变化,并实现载荷在 2024年2月23日 清华大学出版社清华大学出版社
.jpg)
五种类型的机器人手臂典型机构解析驼驮网 tuotuo
2020年3月18日 手臂回转和升降运动是通过机座的立柱实现的,立柱的横向移动即为手臂的横移。手臂的各种运动通常由驱动机构和各种传动机构来实现。手臂的 3 个自由度,可以有不同的运动 (自由度)组合,通常可以将其设计成如图的五种形式。直角坐标型机器人 也叫直线运 动单元,它就是一个独立的运动轴,主要由支撑载体的铝型材或钢型材和被安装在型材内部的直 线导轨、运动滑块以及作为带动滑块做高速运动的同步带组成。 其核心 元件 为——直线定 直角坐标型机器人 百度百科
.jpg)
第2章工业机器人的机械结构 百度文库
第2章工业机器人的机械结构第十三页,共67页。 22 工业机器人臂部结构三、机器人臂部机构 2.臂部俯仰机构机器人手臂的俯 仰运动一般采用 活塞(气)缸与 连杆机构联用来 实现。铰接活塞缸实现手臂俯仰运动结构示意图 1—手部 2—夹紧缸 3—升降缸 知乎专栏 随心写作,自由表达 知乎知乎专栏 随心写作,自由表达 知乎
.jpg)
柔性机械臂的控制方式有哪几种? 慧灵HITBOT
2022年11月2日 柔性机械臂的控制方式有哪几种? 近年来,随着机器人技术的发展,高速、高精度、高负载重量比的机器人结构引起了工业和航空航天领域的关注。 由于运动过程中关节和连杆的柔度效应增加,导致结构变形,降低任务执行的准确性。2023年7月20日 机械臂是一种能够模拟人类手臂运动的机器装置,在工业生产、医疗、军事等领域发挥着重要作用。 机械臂结构 的设计是实现其高效运行和精准操作的关键。机械臂的基本结构包括机械臂本体、关节和末端执行器。机械臂本体是由多个连接的杆 机械臂结构大族机器人

【Robot 学院】一文读懂六轴机器人运动原理和机
2018年8月28日 六轴关节机器人的机械结构 上图为常见的六轴关节机器人的机械结构,六个伺服电机直接通过减速器、同步带轮等驱动六个关节轴的旋转。六轴工业机器人一般有6个自由度,常见的六轴工业机器人包含 2017年11月1日 图410所示为3自由度手腕的几种结合方式。 4 常见的腕部结构 图411所示为RRR型3自由度手腕,三个传动轴的回转轴线共线,及,转动实现手 臂的臂转,和A的转动实现腕转。RRR型手腕制造简单,润滑条件好,可以实现较远距 离的传动,机械效率高 工业机器人的腕部和手部结构

知乎 有问题,就会有答案
浮石粉碎设备浮石砌块
--电路版氰化湿法冶黄金法
--巴林右旗鑫源矿业石灰石微粉
--石场制粉机维修与保养
--棕刚玉细粉加工设备
--立式细碎机销售点
--铅锌矿多少钱一吨
--石灰在建筑中的应用石灰在建筑中的应用石灰在建筑中的应用
--铁矿尾砂可以当作耐火原料吗
--1200x1500欧版磨粉机价格
--石膏和腻子的区别
--炭黑粉
--去石油队要办什么证
--大兴磨粉机
--超细硫酸钡的生产工艺
--在煤里能有什么石头
--磨粉设备淄博
--广东灰钙
--QJ341欧版磨粉机
--石碾加工钾长石
--开个小型机械加工厂需要多少钱
--生石灰辊压机
--弹簧立式破和硅石立式破的对比
--炭黑粉碎机
--方解石炭黑母粒加工过程详细
--凯斯特履带式矿石粉碎站说明书凯斯特履带式矿石粉碎站说明书凯斯特履带式矿石粉碎站说明书
--高纯超细硅粉属于哪级
--建一个年产七十万方的磨粉厂需投入多少设备
--打砂安全操作规程
--石膏板生产设备
--